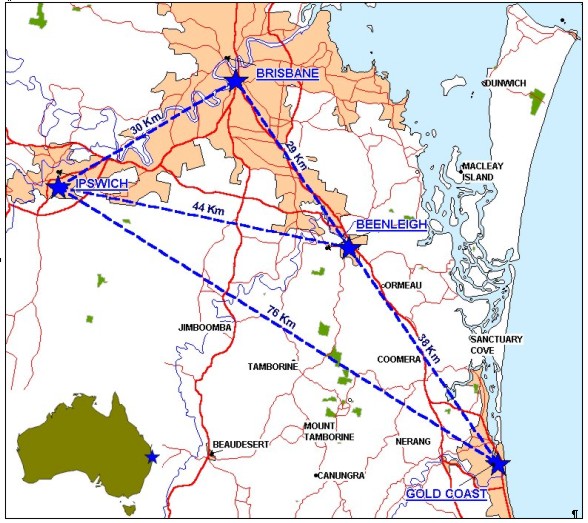
AN AUSTRALIAN PILOT PROJECT FOR A REAL TIME KINEMATIC GPS NETWORK USING THE VIRTUAL REFERENCE STATION CONCEPTMatthew B HIGGINS, AustraliaKey words: GPS, Surveying, Real Time Kinematic, Virtual Reference Station. ABSTRACTThe Virtual Reference Station (VRS) concept from Trimble Navigation is designed to support high-precision positioning over a wide area. The system involves permanently running GPS reference stations, at spacings up to 70km, then feeding GPS data to a central processing computer via a computer network. The central processing facility then models spatial errors that limit GPS accuracy. Corrections are then generated and made available for roving receivers as required. VRS systems support a multitude of positioning applications and enable roving receivers to be positioned anywhere inside the network with an accuracy better than a few centimetres in real time. The concept is an extension of the so-called real time kinematic (RTK) technique developed for GPS surveying and other forms of high precision positioning. VRS overcomes three main limitations of the current RTK technique. Firstly, operators no longer need to establish and run their own base GPS receiver and base radio every time they want to work. Secondly, the use of mobile phone technology overcomes the limitation of the range of radio communications. Thirdly, multiple base stations increase the redundancy and thus the confidence in the resulting rover positions. A pilot network has been established over the south-east corner of the state of Queensland as a partnership between the Queensland Department of Natural Resources and Mines (NRM), Trimble Navigation and Ultimate Positioning. The pilot network is the first of its kind in the Southern Hemisphere and capitalises on existing infrastructure using four NRM offices and the computer network linking them and on NRM's existing GPS equipment and expertise. At the time of writing this paper, the pilot network has been established but full testing of rover receivers is yet to begin. Therefore, this paper outlines the establishment of the network and plans for investigating the technical and financial feasibility of the VRS approach. The project is planned for completion prior to this conference and latest progress will be presented at the conference. INTRODUCTION: THE VIRTUAL REFERENCE STATION CONCEPTThe Virtual Reference Station (VRS) concept from Trimble Navigation is an extension of the so-called real time kinematic (RTK) technique developed for GPS surveying and other forms of high precision positioning. With RTK, one can establish a base (or reference) station at a known point and broadcast the data from the reference station to one or more roving receivers. The computer processor at the roving receivers (usually in the handheld data recorder or survey controller) combines the reference station data with the rover data. With modern equipment, only a few epochs of data are typically required to fix the ambiguities associated with the GPS phase data observable and compute a GPS baseline; the difference in latitude, longitude and height between the reference and rover positions. RTK enables the roving receivers to be positioned with accuracy better than a few centimetres relative to the reference station. Before RTK, GPS baselines had to be post-processed in the office. The ability of RTK to process and display results in real time is further revolutionising the productivity achievable with GPS. VRS takes the productivity increase a step further by overcoming three main limitations of the current RTK technique. Firstly, operators no longer need to establish and run a GPS receiver and radio at their own reference station every time they want to work. Secondly, the use of mobile phone technology overcomes the limitation of the range of radio communications. Thirdly, multiple reference stations increase the redundancy and thus the confidence in the resulting rover positions. The VRS concept involves permanently running GPS reference stations, at spacings up to 70km. They feed their GPS data to a central processing computer via a computer network. The central processing computer can use the reference station data to model spatial errors that limit GPS accuracy and generate appropriate corrections. From the user's perspective, a roving receiver makes a mobile phone call into the central processing facility, supplying its approximate position (based on a GPS navigation position) and requesting corrections. The central processing computer then generates corrections as though there was a reference station at the coordinates of the rover's approximate position and the rover is positioned relative to this virtual reference station. For more information on the technical background to VRS see Vollath et al (2000a), Vollath et al (2000b) and Trimble (2000). THE AUSTRALIAN PILOT PROJECTThe Department of Natural Resources and Mines (NRM) of the Queensland Government is responsible for the surveying and geodetic infrastructure of the Australian state of Queensland. Given the potential impact of VRS on future development of that infrastructure, NRM approached Trimble Australia and its agent in the area, Ultimate Positioning, to establish a pilot project. The location for the proposed VRS network is shown in Figure 1 and the following points are relevant:
Figure 1 Proposed Location of VRS Base Stations GOALS OF THE PILOT PROJECTThe goals of the pilot project have been broken into three main areas and are detailed below. ESTABLISHING AND RUNNING THE VRS NETWORKThe project will investigate the technical and financial aspects of establishing and running a VRS network, including:
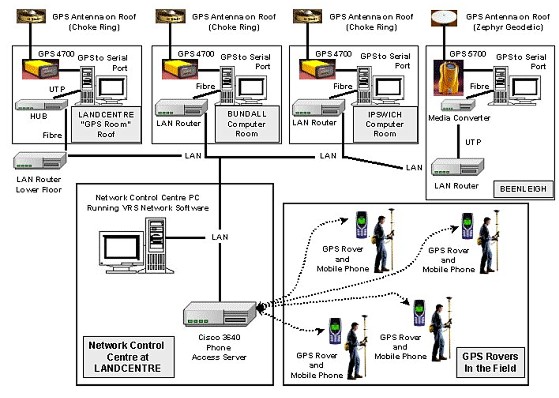
Figure 2 shows how the architecture for linking the GPS reference stations, the computer network and the mobile phone network. The pilot project uses personal computers running Microsoft Windows NT 4 at each of the reference stations. Their basic purpose is simply to translate the GPS data from the serial port to network protocol (TCP) and send it to the central processing computer as required. As such, personal computers have much more power than is necessary for a production situation but has been used for the pilot project to facilitate remote control of reference stations (eg to simulate outages) and to facilitate monitoring of load on the WAN/LAN.
Figure 2 Information Technology Architecture for VRS At each site fibre optic cable is used between the GPS PC and the rest of the LAN/WAN. This is to protect against lightning strike damaging the LAN. In terms of the GPS component, Trimble equipment is used at all sites. At the Landcentre, Ipswich, and Gold Coast sites, 4700 receivers and choke ring antennae, supplied by NRM, are being used. At the Beenleigh site, Trimble has supplied the newly released 5700 receiver and Zephyr Geodetic antenna. GPS ROVERS WITHIN A VRS NETWORKThe project will also investigate the technical and financial aspects of running GPS rovers within a VRS network. A detailed testing plan will include matters such as:
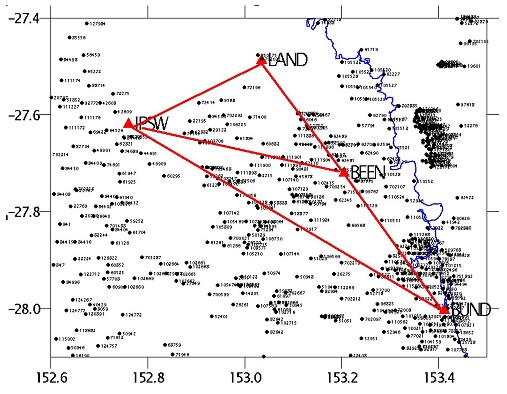
Figure 3 Existing Geodetic Network and the VRS Network As mentioned earlier, the VRS network runs over a 3 to 5km density network of existing control stations observed with static and fast static GPS. The homogeneity of the network and its direct connection to the networks forming the backbone of the Geocentric Datum of Australia enable testing against high quality three dimensional coordinates (including consistent ellipsoidal height). Figure 3 shows this existing geodetic network in relation to the VRS network. A least squares adjustment of the GPS baselines between the reference stations and static GPS baselines connecting each to the local geodetic network ensure that VRS network maintains a high level of homogeneity with the underlying geodetic network. Stations in this geodetic network will be occupied with VRS rovers to quantify the accuracy achievable inside and outside the VRS network. Geodetic network stations of comparable quality are also available further away from the VRS network and these will be occupied to quantify the achievable DGPS accuracy. COMMERCIAL VIABILITYAs well as the technical aspects, the project will investigate the commercial viability of a VRS network, including potential clients, revenue etc. Sound assessment of commercial viability will be facilitated through involvement of key players in government and industry in the fields of surveying, earth moving, mining and agriculture.
CONCLUSIONThis paper has described a pilot project to establish a network of permanently running GPS reference stations to support high precision positioning using the Virtual Reference Station (VRS) concept. VRS overcomes many of the limitations of the current real time kinematic (RTK) GPS surveying technique. The network covers the southeast corner of the Australian state of Queensland and represents the first time that VRS has been deployed in the Southern Hemisphere. At the time of writing, the pilot network has been established but full testing of rover receivers is yet to begin. Therefore, this paper has concentrated on the establishment of the network and outlined what is planned for investigating the technical and financial feasibility of the VRS approach. The presentation at the conference will present latest progress and future papers will report the outcomes of the pilot project. REFERENCESTrimble, 2000, GPS Reference Station Networks, Product Brochure,
Spectra Precision Terrasat GmbH, Trimble Navigation Limited, September
2000. Vollath U., A. Buerchl, H. Landau, C. Pagels and B. Wagner, 2000a, Multi-Base RTK Positioning Using Virtual Reference Stations, Proceedings of ION GPS 2000, 13th International Technical Meeting of the Satellite Division of the Institute of Navigation, September 2000, Salt Lake City, Utah. Vollath U., A. Buerchl, H. Landau, C. Pagels and B. Wagner, 2000b, Long-Range RTK Positioning Using Virtual Reference Stations, Proceedings of ION GPS 2000, 13th International Technical Meeting of the Satellite Division of the Institute of Navigation, September 2000, Salt Lake City, Utah. BIOGRAPHICAL NOTEMatt Higgins is a Senior Surveyor with the Department of Natural Resources and Mines, Queensland, Australia. He received Bachelor and Masters degrees in Surveying in 1983 and 1988, respectively. He is presently undertaking a PhD at the University of New South Wales working in GPS Heighting. Matt is Vice Chair of FIG Commission 5 on Positioning and Measurement for the period 1998 to 2002. He is on the Editorial Advisory Board of GPS World Magazine. Matt is also a member of the Geodesy Sub-Committees of both the Australian Academy of Sciences and the Inter-Governmental Committee on Surveying and Mapping for Australia and New Zealand. CONTACTMatt Higgins 17 April 2001 This page is maintained by the FIG Office. Last revised on 15-03-16. |